给定系统

假设 的根都不在虚轴上,并且令
的根都不在虚轴上,并且令
 = 是的根的实部为负数的个数,
= 是的根的实部为负数的个数, = 是的根的实部为正数的个数,
= 是的根的实部为正数的个数,
因此可得

将 以极坐标型式表示,可得
以极坐标型式表示,可得

其中
![{\displaystyle \rho (x)={\sqrt {{\mathfrak {Re}}^{2}[f(x)]+{\mathfrak {Im}}^{2}[f(x)]}}\quad (5)}](//wikimedia.org/api/rest_v1/media/math/render/svg/f3342273646dc0f1235561b387b7af52e776938a)
且
![{\displaystyle \theta (x)=\tan ^{-1}{\big (}{\mathfrak {Im}}[f(x)]/{\mathfrak {Re}}[f(x)]{\big )}\quad (6)}](//wikimedia.org/api/rest_v1/media/math/render/svg/f7b2086266668256c2065a93ae151bb2aba594d0)
根据(2)会发现

其中

若的第i个根的实部为正,则(用y=(RE[y],IM[y])的表示法)
![{\displaystyle {\begin{aligned}\theta _{r_{i}}(x){\big |}_{x=-j\infty }&=\angle (x-r_{i}){\big |}_{x=-j\infty }\\&=\angle (0-{\mathfrak {Re}}[r_{i}],-\infty -{\mathfrak {Im}}[r_{i}])\\&=\angle (-|{\mathfrak {Re}}[r_{i}]|,-\infty )\\&=\pi +\lim _{\phi \to \infty }\tan ^{-1}\phi ={\frac {3\pi }{2}}\quad (9)\\\end{aligned}}}](//wikimedia.org/api/rest_v1/media/math/render/svg/8b5b7395910dafa111cef24840a04b6f678dde27)
且
![{\displaystyle \theta _{r_{i}}(x){\big |}_{x=j0}=\angle (-|{\mathfrak {Re}}[r_{i}]|,0)=\pi -\tan ^{-1}0=\pi \quad (10)}](//wikimedia.org/api/rest_v1/media/math/render/svg/a8a52bccf4aeb16d032d5a102c1ae9bc8b6bcd1f)
且
![{\displaystyle \theta _{r_{i}}(x){\big |}_{x=j\infty }=\angle (-|{\mathfrak {Re}}[r_{i}]|,\infty )=\pi -\lim _{\phi \to \infty }\tan ^{-1}\phi ={\frac {\pi }{2}}\quad (11)}](//wikimedia.org/api/rest_v1/media/math/render/svg/838372f37cf13c3c184a2477039b676104cb7a5f)
同样地,若的第i个根的实部为负,
![{\displaystyle {\begin{aligned}\theta _{r_{i}}(x){\big |}_{x=-j\infty }&=\angle (x-r_{i}){\big |}_{x=-j\infty }\\&=\angle (0-{\mathfrak {Re}}[r_{i}],-\infty -{\mathfrak {Im}}[r_{i}])\\&=\angle (|{\mathfrak {Re}}[r_{i}]|,-\infty )\\&=0-\lim _{\phi \to \infty }\tan ^{1}\phi =-{\frac {\pi }{2}}\quad (2)\\\end{aligned}}}](//wikimedia.org/api/rest_v1/media/math/render/svg/de58d21c449a38a7a60691d0083d7d1d5a467d67)
且
![{\displaystyle \theta _{r_{i}}(x){\big |}_{x=j0}=\angle (|{\mathfrak {Re}}[r_{i}]|,0)=\tan ^{-1}0=0\,\quad (13)}](//wikimedia.org/api/rest_v1/media/math/render/svg/f0af975bb9b398ec5e8cf3b476787d1db575c52d)
且
![{\displaystyle \theta _{r_{i}}(x){\big |}_{x=j\infty }=\angle (|{\mathfrak {Re}}[r_{i}]|,\infty )=\lim _{\phi \to \infty }\tan ^{-1}\phi ={\frac {\pi }{2}}\,\quad (14)}](//wikimedia.org/api/rest_v1/media/math/render/svg/ec04aab88fc87619bb9b6771313b6b3e63ccb771)
由(9)至(11)式可知,若的第i个根实部为正,则 ,由(12)至(14)式可知,若的第i个根实部为负,则
,由(12)至(14)式可知,若的第i个根实部为负,则 。因此
。因此

若定义

则可以得到以下的关系

结合(3)式及(17)式可得
 且
且
因此,给定 次的方程,只需要计算
次的方程,只需要计算 ,就可以得到根的实部为负的个数,以及根的实部为正的个数。
,就可以得到根的实部为负的个数,以及根的实部为正的个数。

|
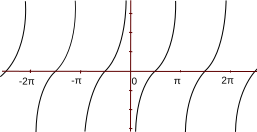
| 图1
|
 相对 相对 的图 的图
|
配合(6)式及图1,相对的图,将 在区间(a,b)之间变化,其中
在区间(a,b)之间变化,其中 ,而
,而 ,都是
,都是 的整数倍,若此变化会使函数
的整数倍,若此变化会使函数 增加,表示在从点a到点b的过程中,
增加,表示在从点a到点b的过程中,![{\displaystyle \tan \theta (x)={\mathfrak {Im}}[f(x)]/{\mathfrak {Re}}[f(x)]}](//wikimedia.org/api/rest_v1/media/math/render/svg/517bdc0afc4cdf73846d5681bfd6527a3189b43f) 从
从 “跳到”
“跳到” 的次数比从“跳到”的次数多一次。相反的,此变化会使函数减少,表示在从点a到点b的过程中,从“跳到”的次数比从“跳到”的次数少一次。
的次数比从“跳到”的次数多一次。相反的,此变化会使函数减少,表示在从点a到点b的过程中,从“跳到”的次数比从“跳到”的次数少一次。
因此, 是
是![{\displaystyle {\mathfrak {Im}}[f(x)]/{\mathfrak {Re}}[f(x)]}](//wikimedia.org/api/rest_v1/media/math/render/svg/2f620a737220c91bbf20684bf6b26abd7231b22c) 从跳到的次数,减掉同函数从跳到的次数,两者差的倍。假设在
从跳到的次数,减掉同函数从跳到的次数,两者差的倍。假设在 处,
处,![{\displaystyle \tan[\theta (x)]}](//wikimedia.org/api/rest_v1/media/math/render/svg/1add4cb96e2e9fde725301edaec88e5603cbf8ef) 有定义
有定义
|
| 图2
|
 相对的图 相对的图
|
若起始点是在不连续点( , i = 0, 1, 2, ...),则因为公式(17)(和都是整数,因此也是整数),其结束点也会在不连续点。此时可以调整指标函数(正跳跃和负跳跃的差值)的计算方式,将正切函数的X轴移动
, i = 0, 1, 2, ...),则因为公式(17)(和都是整数,因此也是整数),其结束点也会在不连续点。此时可以调整指标函数(正跳跃和负跳跃的差值)的计算方式,将正切函数的X轴移动 ,也就是在上加。此时的指标函数在各种的系数组合下都有定义,就是在起始点(及结束点)连续的区间(a,b) =
,也就是在上加。此时的指标函数在各种的系数组合下都有定义,就是在起始点(及结束点)连续的区间(a,b) =  内计算
内计算![{\displaystyle \tan[\theta ]={\mathfrak {Im}}[f(x)]/{\mathfrak {Re}}[f(x)]}](//wikimedia.org/api/rest_v1/media/math/render/svg/1ac74db804df37ddb6ef8ff4d6f721bd086850a8) ,再在起始点连续的区间,计算
,再在起始点连续的区间,计算
![{\displaystyle \tan[\theta '(x)]=\tan[\theta +\pi /2]=-\cot[\theta (x)]=-{\mathfrak {Re}}[f(x)]/{\mathfrak {Im}}[f(x)]\quad (19)}](//wikimedia.org/api/rest_v1/media/math/render/svg/6e718d1233f9c08d6cb4344dae637f97bc9804db)
差值是从正跳跃和负跳跃的差值,若计算从 到
到 所产生的差值,即为相角正切的柯西指标,其相角为或
所产生的差值,即为相角正切的柯西指标,其相角为或 ,视
,视 是否是的整数倍而定。
是否是的整数倍而定。







![{\displaystyle \rho (x)={\sqrt {{\mathfrak {Re}}^{2}[f(x)]+{\mathfrak {Im}}^{2}[f(x)]}}\quad (5)}](http://wikimedia.org/api/rest_v1/media/math/render/svg/f3342273646dc0f1235561b387b7af52e776938a)
![{\displaystyle \theta (x)=\tan ^{-1}{\big (}{\mathfrak {Im}}[f(x)]/{\mathfrak {Re}}[f(x)]{\big )}\quad (6)}](http://wikimedia.org/api/rest_v1/media/math/render/svg/f7b2086266668256c2065a93ae151bb2aba594d0)


![{\displaystyle {\begin{aligned}\theta _{r_{i}}(x){\big |}_{x=-j\infty }&=\angle (x-r_{i}){\big |}_{x=-j\infty }\\&=\angle (0-{\mathfrak {Re}}[r_{i}],-\infty -{\mathfrak {Im}}[r_{i}])\\&=\angle (-|{\mathfrak {Re}}[r_{i}]|,-\infty )\\&=\pi +\lim _{\phi \to \infty }\tan ^{-1}\phi ={\frac {3\pi }{2}}\quad (9)\\\end{aligned}}}](http://wikimedia.org/api/rest_v1/media/math/render/svg/8b5b7395910dafa111cef24840a04b6f678dde27)
![{\displaystyle \theta _{r_{i}}(x){\big |}_{x=j0}=\angle (-|{\mathfrak {Re}}[r_{i}]|,0)=\pi -\tan ^{-1}0=\pi \quad (10)}](http://wikimedia.org/api/rest_v1/media/math/render/svg/a8a52bccf4aeb16d032d5a102c1ae9bc8b6bcd1f)
![{\displaystyle \theta _{r_{i}}(x){\big |}_{x=j\infty }=\angle (-|{\mathfrak {Re}}[r_{i}]|,\infty )=\pi -\lim _{\phi \to \infty }\tan ^{-1}\phi ={\frac {\pi }{2}}\quad (11)}](http://wikimedia.org/api/rest_v1/media/math/render/svg/838372f37cf13c3c184a2477039b676104cb7a5f)
![{\displaystyle {\begin{aligned}\theta _{r_{i}}(x){\big |}_{x=-j\infty }&=\angle (x-r_{i}){\big |}_{x=-j\infty }\\&=\angle (0-{\mathfrak {Re}}[r_{i}],-\infty -{\mathfrak {Im}}[r_{i}])\\&=\angle (|{\mathfrak {Re}}[r_{i}]|,-\infty )\\&=0-\lim _{\phi \to \infty }\tan ^{1}\phi =-{\frac {\pi }{2}}\quad (2)\\\end{aligned}}}](http://wikimedia.org/api/rest_v1/media/math/render/svg/de58d21c449a38a7a60691d0083d7d1d5a467d67)
![{\displaystyle \theta _{r_{i}}(x){\big |}_{x=j0}=\angle (|{\mathfrak {Re}}[r_{i}]|,0)=\tan ^{-1}0=0\,\quad (13)}](http://wikimedia.org/api/rest_v1/media/math/render/svg/f0af975bb9b398ec5e8cf3b476787d1db575c52d)
![{\displaystyle \theta _{r_{i}}(x){\big |}_{x=j\infty }=\angle (|{\mathfrak {Re}}[r_{i}]|,\infty )=\lim _{\phi \to \infty }\tan ^{-1}\phi ={\frac {\pi }{2}}\,\quad (14)}](http://wikimedia.org/api/rest_v1/media/math/render/svg/ec04aab88fc87619bb9b6771313b6b3e63ccb771)









.jpg)







![{\displaystyle \tan \theta (x)={\mathfrak {Im}}[f(x)]/{\mathfrak {Re}}[f(x)]}](http://wikimedia.org/api/rest_v1/media/math/render/svg/517bdc0afc4cdf73846d5681bfd6527a3189b43f)



![{\displaystyle {\mathfrak {Im}}[f(x)]/{\mathfrak {Re}}[f(x)]}](http://wikimedia.org/api/rest_v1/media/math/render/svg/2f620a737220c91bbf20684bf6b26abd7231b22c)

![{\displaystyle \tan[\theta (x)]}](http://wikimedia.org/api/rest_v1/media/math/render/svg/1add4cb96e2e9fde725301edaec88e5603cbf8ef)
.svg)




![{\displaystyle \tan[\theta ]={\mathfrak {Im}}[f(x)]/{\mathfrak {Re}}[f(x)]}](http://wikimedia.org/api/rest_v1/media/math/render/svg/1ac74db804df37ddb6ef8ff4d6f721bd086850a8)
![{\displaystyle \tan[\theta '(x)]=\tan[\theta +\pi /2]=-\cot[\theta (x)]=-{\mathfrak {Re}}[f(x)]/{\mathfrak {Im}}[f(x)]\quad (19)}](http://wikimedia.org/api/rest_v1/media/math/render/svg/6e718d1233f9c08d6cb4344dae637f97bc9804db)






![{\displaystyle {\begin{aligned}f(j\omega )&=(-1)^{n/2}{\big [}a_{0}\omega ^{n}-a_{1}\omega ^{n-2}+a_{2}\omega ^{n-4}-\cdots {\big ]}&{}\quad (23)\\&+j(-1)^{(n/2)-1}{\big [}b_{0}\omega ^{n-1}-b_{1}\omega ^{n-3}+b_{2}\omega ^{n-5}-\cdots {\big ]}&{}\\\end{aligned}}}](http://wikimedia.org/api/rest_v1/media/math/render/svg/4e495902015ba0b7f57501e6d3d82ee9ab5ef62a)
![{\displaystyle {\begin{aligned}f(j\omega )&=j(-1)^{(n-1)/2}{\big [}a_{0}\omega ^{n}-a_{1}\omega ^{n-2}+a_{2}\omega ^{n-4}-\cdots {\big ]}&{}\quad (24)\\&+(-1)^{(n-1)/2}{\big [}b_{0}\omega ^{n-1}-b_{1}\omega ^{n-3}+b_{2}\omega ^{n-5}-\cdots {\big ]}&{}\\\end{aligned}}}](http://wikimedia.org/api/rest_v1/media/math/render/svg/2031e504dd4c89445e158080035a39a2e0e17c2b)



![{\displaystyle \Delta =I_{-\infty }^{+\infty }{\frac {-{\mathfrak {Im}}[f(x)]}{{\mathfrak {Re}}[f(x)]}}=I_{-\infty }^{+\infty }{\frac {b_{0}\omega ^{n-1}-b_{1}\omega ^{n-3}+\cdots }{a_{0}\omega ^{n}-a_{1}\omega ^{n-2}+\ldots }}\quad (25)}](http://wikimedia.org/api/rest_v1/media/math/render/svg/d9829781584a0ac5eac8c828f3b075583bb496da)
![{\displaystyle \Delta =I_{-\infty }^{+\infty }{\frac {{\mathfrak {Re}}[f(x)]}{{\mathfrak {Im}}[f(x)]}}=I_{-\infty }^{+\infty }{\frac {b_{0}\omega ^{n-1}-b_{1}\omega ^{n-3}+\ldots }{a_{0}\omega ^{n}-a_{1}\omega ^{n-2}+\ldots }}\quad (26)}](http://wikimedia.org/api/rest_v1/media/math/render/svg/3d8786a9be2f8a0f8cff61b436453fa922966c5d)
