Kinematski par
From Wikipedia, the free encyclopedia
Remove ads
Kinematski par obrazuju dva međusobno povezana tela čija su kretanja u uzajamnoj vezi. To znači da ova dva tela jedno drugome ograničavaju kretanje. U klasičnoj mehanici, kinematički par je veza između dva fizička objekta koja nameće ograničenja na njihovo relativno kretanje (kinematika[1][2]). Nemački inženjer Franc Rolo je predstavio kinematički par kao novi pristup proučavanju mašina[3] koji je omogućio napredak u odnosu na kretanje elemenata koji se sastoje od jednostavnih mašina.[4]
Remove ads
Opis
Kinematika je grana klasične mehanike[5] koja opisuje kretanje tačaka, tela (objekata) i sistema tela (grupa objekata) bez razmatranja uzroka kretanja.[2] Kinematika se kao oblast proučavanja često naziva „geometrija kretanja“.[6] Za više detalja, pogledajte Kinematika.
Hartenberg & Denavit[7] predstavljaju definiciju kinematičkog para:
U pitanju veza između krutih tela, Rulo je prepoznao dve vrste; nazivao ih je višim i nižim parovima (elemenata). Kod viših parova, dva elementa su u kontaktu u tački ili duž linije, kao kod kugličnog ležaja ili diska i pratioca; relativna kretanja podudarnih tačaka su različita. Niži parovi su oni za koje se može vizualno prikazati kontakt u oblasti, kao što je kod spojeva igle, ukrštenih glava,[8][9] kugličnih i utičnih spojeva i nekih drugih; relativno kretanje podudarnih tačaka elemenata, a samim tim i njihovih veza, je slično, a razmena elemenata iz jedne veze u drugu ne menja relativno kretanje delova kao što bi to bilo sa višim parovima.
U kinematici, dva povezana fizička objekta, koja čine kinematički pari, nazivaju se „kruta tela“. U studijama mehanizama, manipulatora ili robota, ova dva objekta se obično nazivaju „veze“.
Remove ads
Mehanički sistem
Mehanički sistem čine tela koja su međusobno povezana vezama koje ograničavaju slobodno kretanje svakog tela u sistemu.[10][11][12] To znači da kretanje jednog tela izaziva kretanje svih ostalih tela u sistemu. Kod robota mehanički sistem ima zadatak da uspostavi prostorne odnose između završnog uređaja (šake, alata …) i radnog predmeta.
Mehanizam
Mehanizam je osnova svake mašine, pa i robota. Mehanizam ima zadatak da jednu vrstu kretanja pretvara u drugu, dok mašina pretvara jedan oblik energije u drugi. Članovi mehanizma su kruta materijalna tela od kojih je sastavljen mehanizam. Vodeće (pogonski) članovi prenose kretanje na ostale članove mehanizma. Svi ostali su vođeni (gonjeni) članovi. Svaki mehanizam se sastoji iz pokretnih članova (segmenata) i nepokretnih članova (postolja). Ako se međusobno povežu dva tela, od kojih je barem jedno pokretno, tad nastaje kinematski par (zglob).
Slobodno telo

Na početku, posmatramo slobodno telo.[14][15] U Dekartovom pravouglom koordinatnom sistemu ono može da se kreće na šest različitih nezavisnih načina. To su tri translacije duž koordinatnih osa i tri rotacije oko tih osa. To znači da je potrebno 6 nezavisnih veličina (parametara) da bi se jednoznačno odredio položaj slobodnog tela (tri za translatorno i tri za rotaciono kretanje).
Broj stepeni slobode
Broj stepeni slobode (n) je broj mogućih nezavisnih kretanja.[16] To je broj nezavisnih parametara koji su potrebni da bi se jednoznačno odredio položaj tela.[17] Slobodno telo ima šest stepeni slobode, tri za translaciju i tri za rotaciju pa je n=6. Telo u kinematskom paru, usled nametnute veze i ograničenog kretanja, ima manje od šest stepeni slobode.
Remove ads
Klase kinematskih parova
Kinematski parovi se dele u zavisnosti od načina vezivanja i realizacije veza između segmenata. Kinematske parove delimo na klase.
Klasa (k) je broj ukinutih (poništenih) slobodnih kretanja tela usled nametnute veze u kinematskom paru. To znači da klasa predstavlja broj izgubljenih stepeni slobode. Zato se kaže i da je klasa dopuna broja stepeni slobode do 6. Uvek je n+k=6.
Za primjenu u robotici najvažniji su kinematski parovi pete klase. Kinematski par pete klase dozvoljava samo jednu rotaciju (rotacioni par), odnosno samo jednu translaciju (translatorni par), što znači da ima jedan stepen slobode.
Pored parova pete klase, u teoriji robotike koriste se i drugi kinemarski parovi.
Remove ads
Galerija
 Slobodno telo
Slobodno telo Kinematski par I klase
Kinematski par I klase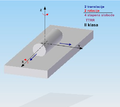 Kinematski par II klase
Kinematski par II klase Kinematski par III klase
Kinematski par III klase Kinematski par IV klase
Kinematski par IV klase Kinematski par V klase - rotacioni
Kinematski par V klase - rotacioni Kinematski par V klase - translatorni
Kinematski par V klase - translatorni






Reference
Literatura
Spoljašnje veze
Wikiwand - on
Seamless Wikipedia browsing. On steroids.
Remove ads