Mars Reconnaissance Orbiter
From Wikipedia, the free encyclopedia

Remove ads
Mars Reconnaissance Orbiter (MRO) on NASA Marsi uurimisprogrammi raames välja töötatud kosmosesond, mille eesmärk on otsida tõendeid vee olemasolu kohta Marsil ning toetada teisi Marsi-missioone. Sondi maksumus on 720 miljonit USA dollarit.[2] Missioon pidi kestma kaks aastat, kuid see on kestnud üle kümne aasta.[2]
See artikkel ootab keeletoimetamist. (Oktoober 2023) |


MRO startis Marsile 12. augustil 2005 ja jõudis Marsi orbiidile 10. märtsil 2006.[3][4] Pärast kuuekuulist aeropidurdusfaasi asus MRO 2006. aasta novembris oma lõplikule teadusorbiidile ja alustas seejärel planeedi uurimist.[5][6] Missiooni põhieesmärgid on Marsi kliima jälgimine, geoloogiliste protsesside uurimine, võimalike tulevaste maandumiskohtade kaardistamine ning teiste missioonide andmeside toetamine. Nende ülesannete täitmiseks on sond varustatud mitmesuguste seadmetega, mille hulgas on kolm kaamerat, kaks spektromeetrit ja maa-alust struktuuri uuriv radar.[7]
Seisuga 29. juuli 2023 oli sond Maale saatnud üle 450 terabiti teadusandmeid, aidanud valida NASA Marsi-maanduritele ohutuid maandumiskohti, avastanud puhta veejääga uusi kraatreid ning kogunud lisatõendeid selle kohta, et vesi on kunagi voolanud Marsi pinnal. Satelliidi sidesüsteemid on nii võimsad, et NASA loodab seda kasutada ülekandejaamana ka tulevaste missioonide jaoks.[2]
Remove ads
Missiooni eesmärgid
Mars Reconnaissance Orbiteril on nii teaduslikud kui ka Marsi uurimismissioone toetavad eesmärgid. Selle peamine teadusmissioon oli algselt plaanitud kestma novembrist 2006 kuni novembrini 2008, samas kui missioonide toetamine pidi kestma 2006. aasta novembrist kuni 2010. aasta novembrini. Mõlemat on hiljem pikendatud. Mars Reconnaissance Orbiter toimib side ülekandejaamana, mis vahendab suhtlust Maa ning Marsil asuvate kulgurite ja maandurite vahel.[8]
MRO ametlikud teaduslikud eesmärgid on järgmised: jälgida Marsi kliimat, keskendudes eriti atmosfääri ringlusele ja hooajalistele muutustele, otsida märke kunagisest ja praegusest vee olemasolust ning uurida, kuidas vesi on planeedi pinnavorme kujundanud. Veel oli eesmärgiks kaardistada ning analüüsida geoloogilisi protsesse, mis on Marsi pinda vorminud. MRO-d kasutati ka varem kadunuks jäänud Mars Polar Landeri ja Beagle 2 rusude otsimisel.[9] Mars Reconnaissance Orbiter leidis Beagle 2 tervena 2015. aastal, kuid Mars Polar Landerit pole leitud.[10][11]
Marsi teiste missioonide toetamiseks on MRO-l ka missioonituge pakkuvad eesmärgid. Nende hulka kuulub andmeside vahendamine Marsi pinnal tegutsevatelt seadmetelt Maale ning tulevaste maandumispaikade ja marsikulgurite võimalike liikumistrajektooride ohutuse ja teostatavuse hindamine.[12][13] MRO tehtud fotosid kasutati näiteks Phoenixi, Curiosity, InSighti ja Perseverance'i maandumispaikade valimisel.[14][15]
Remove ads
Start ja orbiidile sisenemine

Mars Reconnaissance Orbiter startis Marsile 12. augustil 2005 ja selle viis orbiidile kanderakett Atlas V.[16]
Sond saabus Marsile seitse ja pool kuud hiljem.[17] Teel olles katsetati ja kalibreeriti enamik teadusseadmeid ning kolm korda korrigeeriti sondi kurssi. Tagamaks õigele orbiidile jõudmine Marsile saabumisel, kavandati neli trajektoori korrigeerimise manöövrit ja arutati viiendat avariimanöövrit. Orbiidile jõudmiseks oli siiski vaja ainult kolme trajektoori korrigeerimise manöövrit ja nii säästeti pikendatud missiooni jaoks 27 kg kütust.[18]
MRO alustas orbiidile sisenemist 10. märtsil 2006, möödudes Marsi lõunapoolkerast umbes 370–400 kilomeetri kõrguselt. Kõik kuus sondi peamootorit töötasid 27 minutit, aeglustades selle kiirust 1000 meetri võrra sekundis. Manööver oli erakordselt täpne – orbiidile sisenemise rada oli planeeritud üle kolme kuu varem ning saavutatud kiiruse muutus erines kavandatust vaid 0,01% võrra. Heeliumipaagi planeeritust madalam temperatuur vähendas mootorite tõukejõudu 2%, kuid pardaarvuti korrigeeris selle automaatselt, lastes mootoril töötada 33 sekundit ettenähtust kauem.[19] Orbiidile sisenemine oli edukas ning MRO jäi väga elliptilisele polaarorbiidile, mille tiirlemisperiood oli ligikaudu 35,5 tundi.[20] Vahetult pärast orbiidile jäämist oli perigee 426 km ja apogee 44 500 km.[21]
MRO ühines Marsi orbiidile saabumisel viie teise aktiivse kosmoseaparaadiga, mis olid kas orbiidil või planeedi pinnal. Orbiidil tiirlesid Mars Global Surveyor, Mars Express ja 2001 Mars Odyssey ning pinnal töötasid kaks marsikulgurit: Spirit ja Opportunity.
30. märtsil 2006 alustas Mars Reconnaissance Orbiter aeropidurdusprotsessi – kolmeetapilist manöövrit, mille eesmärk oli vähendada orbiidi kõrgust ja tiirlemisperioodi, et saavutada madalam ja peaaegu ringikujuline tööorbiit, säästes võimalikult palju kütust. Esimeses etapis alandas sond tõukurite abil oma perigee kõrgust, et Marsi atmosfäär hakkaks sondi aeglaselt pidurdama. Teises etapis mis kestis 445 tiiru ehk ligikaudu viis Maa kuud, säilitati pidevalt perigee kõrgus, tehes samal ajal väiksemaid korrektsioone. Eesmärk oli hoida MRO piisavalt madalal, et sellele mõjuksid pidurdusjõud, kuid piisavalt kõrgel et see liiga palju kiirust ei kaotaks. Kolmandas etapis tõstis MRO 30. augustil 2005 ennast Marsi atmosfääri mõjualast kõrgemale, viies sõiduki stabiilsele teadustöö orbiidile.[22] Septembris 2006 korrigeeris MRO tõukurite abil oma orbiidi veelgi, ning on nüüd 250–316 km kõrgusel orbiidil ning tiirlemisperioodiks on 112 minutit.[23][24]
Remove ads
Teadusaparatuur
MRO pardal on kolm kaamerat, kaks spektromeetrit ja radar. Lisaks on pardal veel kolm tehnilist mõõteriista ning kaks teaduseksperimenti, mis kasutavad inseneeriasüsteemide andmeid teaduslike andmete kogumiseks. Kaks tehnilist mõõteriista on mõeldud uue varustuse testimiseks ja demonstreerimiseks tulevaste missioonide tarbeks. MRO teeb aastas umbes 29 000 pilti.[25]
HiRISE
 Pikemalt artiklis HiRISE
Pikemalt artiklis HiRISE

High Resolution Imaging Science Experiment ehk HiRISE on 0,5-meetrise peegelteleskoobiga kaamera. HiRISE-i teleskoop on seni suurim süvakosmosemissioonil kasutatud teleskoop. Kaamera lahutusvõime on 1 mikroradiaan, mis tähendab, et 300 km kõrguselt suudab see eristada objekte suurusega 0,3 meetrit. Võrdluseks: Maa satelliidipildid on tavaliselt kättesaadavad 0,5-meetrise lahutusvõimega.
HiRISE teeb pilte värvispektri kolmes lainealas: 400–600 nm (sinine-roheline), 550–850 nm (punane) ja 800–1000 nm (lähiinfrapuna).[26] Punase kanali pildid on 20 264 pikslit laiad (umbes 6 km), B–G ja NIR pildid aga 4 048 pikslit laiad (umbes 1,2 km). Punased pildid on 6 km laiad ja teistes lainealades tehtud pildid on 1,2 kilomeetrit laiad. HiRISE-i pardaarvuti loeb saabuvat infot reaalajas ning pildi pikkust piirab ainult pardaarvuti mälu, mis on 28 Gb.[27]
Iga 16,4-gigabitine pilt tihendatakse enne edastamist 5 gigabitile. Võimalike maandumiskohtade kaardistamise hõlbustamiseks suudab HiRISE toota ka stereopilte, millest saab arvutada pinnavormi kuni 0,25-meetrise täpsusega. HiRISE-i ehitas Ball Aerospace & Technologies Corporation.[28]
CTX
.jpg)
Context Camera (CTX) on kaamera, mis teeb mustvalgeid fotosid resolutsiooniga kuni 6 meetrit ja selle eesmärgiks on pildistada taustkaardid HiRISE-i ja CRISM-i jaoks[29]. Lisaks pildistatakse sellega tähtsaks peetavaid regioone ning võimalikke maandumispaiku tulevastele missioonidele.[30][31][32] CTX teeb pilte, mille laius on 30 km ja pikkus kuni 160 kilomeetrit ning selle abil oli 2010. aastaks Marsi pinnast kaardistatud 50 %.[33] 2017. aastaks oli CTX kaardistanud 99 % Marsi pinnast, mis võimaldas NASA-l luua interaktiivse Marsi kaardi, mis avaldati 2023. aastal.[34] Kaamera ehitas ja selle käigus hoidmise eest vastutab Malin Space Science Systems.[35]
MARCI
- Pikemalt artiklis Mars Color Imager

Mars Color Imager (MARCI) on suhteliselt madala lahutusvõimega lainurkkaamera, mis jälgib Marsi pinda viies nähtavas ja kahes ultraviolettkiirguse lainealas.[36] Kaamera teeb iga päev umbes 84 pilti ja koostab globaalse kaardi, mille resolutsioon on 1–10 km piksli kohta. MARCI abil avaldab NASA iganädalase Marsi ilmateate.[37] Kaamera aitab uurida planeedi hooajalisi ja aastaseid muutusi ning kaardistab veeauru ja osooni esinemist planeedi atmosfääris.
Kaamera ehitas ja selle käigus hoidmise eest vastutab Malin Space Science Systems.[38] Sama MARCI kaamera oli ka Marsi atmosfääri kukkunud Mars Climate Orbiteril.
CRISM
- Pikemalt artiklis Compact Reconnaissance Imaging Spectrometer for Mars
Compact Reconnaissance Imaging Spectrometer for Mars (CRISM) on nähtavas ja lähiinfrapunases valguses töötav spektromeeter, mida kasutati Marsi pinnamineraalide üksikasjalike kaartide koostamiseks. Seade töötas lainepikkuste vahemikus 362–3920 nanomeetrit, mõõtes spektrit 544 kanalis, millest igaüks oli 6,55 nanomeetri laiune. Selle ruumiline lahutusvõime oli 18 meetrit, kui see asus 300 kilomeetri kõrgusel. CRISM aitas tuvastada mineraale ja ühendeid, mis viitavad Marsil kunagi või praegu esinevale veele.[39] CRISM lülitati välja 3. aprillil 2023.
MCS

Mars Climate Sounder (MCS) on radiomeeter, mis vaatleb Marsi atmosfääri nii ülalt alla kui ka horisontaalsuunas, et mõõta atmosfääri vertikaalseid muutusi.[40] Seadmel on üks nähtava ja lähiinfrapuna valguse kanal (0,3–3,0 mikromeetrit) ning kaheksa kauginfrapuna kanalit (12–50 mikromeetrit), mis on valitud spetsiaalselt atmosfääriuuringuteks.
MCS jälgib Marsi atmosfääri horisondi suunas (nagu seda näeb MRO), jagades selle vertikaalseteks kihtideks ja tehes mõõtmisi iga 5 km järel.[41][42] Nendest andmetest pannakse kokku globaalsed ilmaandmestikud, mis kirjeldavad Marsi ilma põhiparameetreid: temperatuuri, rõhku, niiskust ja tolmukontsentratsiooni.[43] MCS kaalub umbes 9 kg ja alustas tööd 2006. aasta novembris. Sellest ajast alates on MCS aidanud koostada mesosfääri pilvede kaarte, uurida ja klassifitseerida tolmutorme ning andnud esmakordselt otseseid tõendeid süsihappegaasi lumest Marsil.
Mars Climate Sounderi ehitas NASA Jet Propulsion Laboratory. See on täiustatud versioon seadmetest, mis ehitati Mars Observeri ja Mars Climate Orbiteri missioonide jaoks.[44]
SHARAD
- Pikemalt artiklis SHARAD
Shallow Radar (SHARAD) on radar, mille eesmärk on uurida Marsi polaarjäämütside sisemist struktuuri. SHARAD kasutab HF-raadiolaineid vahemikus 15–25 MHz, mis võimaldab seadmel näha kuni kolme kilomeetri sügavusele ning eristada kihte, mis on vaid 7 meetri paksused. SHARAD on projekteeritud töötama koos Mars Expressi MARSISega, mis on võimeline nägema märkimisväärselt sügavamale kuid mille lahutusvõime on väiksem. SHARAD-i ja MARSISe ehitas Itaalia Kosmoseagentuur.[45]
Remove ads
Muud seadmed
Päikesepaneelid ja elekter

Mars Reconnaissance Orbiter saab kogu kasutatava elektri kahelt päikesepaneelilt, mis võivad liikuda iseseisvalt. Mõlema päikesepaneeli mõõtmed on 5,35 × 2,53 meetrit ja ühe paneeli pindala on 9,5 m.2[46] Päikesepaneele katavad 3744 elementi ja need on võimelised muutma 26% saadavast päikesevalgusest elektriks. Elementide kogutoodang on 32 volti.[47] Marsi orbiidil on Mars Reconnaissance Orbiteri ühe päikesepaneeli võimsus rohkem kui 1000 W ja kui MRO tiirleks Maa orbiidil, oleks ühe päikesepaneeli võimsus 3000 W.[48][49]
Sondil on kaks laetavat nikkel-vesinikakut, mis varustavad sondi elektriga, kui see on Marsi varjus.[50] Mõlemad akud mahutavad 50 amper-tundi, kuid nende mahutavust ei saa täielikult kasutada, et vältida nende kasutuks muutumist. Nimelt peavad mõlemad akud end pidevalt laadima-tühjendama, aga tühjendamisel aku pinge langeb ning kulutab akut. MRO akude selline säästmine võimaldab nende eluiga ja selle kaudu kogu missiooni pikendada, eriti kui arvestada asjaolu, et akude rikked on kõige sagedasem kosmosesondide kaotamise põhjus.
Sondi aeropiduramise ajal mõjutas Marsi atmosfäär kõige rohkem päikesepaneele, mis toimisid väikeste langevarjudena ja aeglustasid sondi kiirust. Insenerid pidid selleks, et Marsi atmosfäär päikesepaneele ei lõhuks, ehitama need nii, et need taluksid temperatuure kuni 200 °C.[51]
Elektroonika
MRO põhiarvutiks on 133 MHz taktsagedusega, 10,4 miljonit transistorit sisaldav 32-bitine RAD750 protsessor – kiirguskarastatud versioon PowerPC 750-st või G3 protsessorist, millele on ehitatud spetsiaalne emaplaat. Protsessor võib tänapäevaste arvutitega võrreldes tunduda nõrk, kuid see on töökindel, vastupidav ning suudab töötada ka päikesetormide tingimustes.[52] Operatsioonisüsteemiks on VxWorks, millele on lisatud ulatuslikud tõrkekindluse protokollid ja pidev süsteemide jälgimine.
Andmeid salvestatakse 160 gigabitises (ehk 20 GB) välkmälumoodulis, mis koosneb enam kui 700 mälukiibist, millest igaüks on mahutavusega 256 Mbit. Tegelikult ei ole see mälumaht kuigi suur, arvestades kogutava andmehulgaga – näiteks üksainus HiRISE kaamera foto võib olla kuni 28 gigabitti suur.[52]
Side


Mars Reconnaissance Orbiter on varustatud läbi aegade võimekaima süvakosmosesse saadetud sidesüsteemiga.[48] Tarkvaraline raadio Electra, mis töötab UHF-sagedusalas, võimaldab paindlikku suhtlust Marsile lähenevate, maanduvate ja seal tegutsevate kosmoseaparaatidega. Electra suudab automaatselt võtta ühendust teiste seadmetega ja aitab näiteks marsikulguril oma asukohta määrata.[53]
Sidepidamine Maaga toimub suure võimendusega, kolme meetri läbimõõduga antenni kaudu, mis kasutab X-riba sagedust (8 GHz) ja Süvakosmose sidevõrku. Maksimaalne andmeedastuskiirus ulatub 3–4 megabitini sekundis, mis on kümme korda kiirem kui ühelgi varasemal Marsi tehiskaaslasel.[54] MRO-l on ka kaks 100-vatist X-riba võimendit (millest üks on varuks) ning üks 35-vatine Ka-riba võimendi, mille abil sooviti katsetada tulevaste missioonide jaoks mõeldud kiiremat sidesüsteemi.[55][56]
Lisaks põhivarustusele on sondil kaks madala võimendusega antenni, mis ei ole paraboolantennid ning suudavad Maaga suhelda ükskõik millise nurga alt. Neid antenne kasutati stardi ja Marsi orbiidile sisenemise ajal ning edaspidi kasutatakse neid vaid hädaolukorras, kui peamine antenn ei ole Maale suunatud.[55]
Ka-riba süsteemi testiti teel Marsile 36 korral ning katseid plaaniti ka teadusmissiooni jooksul. Aeropidurdamise ajal läks üks võimenditest katki ning nüüd töötab suure võimendusega antennil vaid üks Ka-riba võimendi. Kui see samuti rivist välja langeb, ei saa sond enam kasutada kiiret andmevahetust võimaldavat X-riba. Seetõttu otsustas NASA loobuda edasistest Ka-riba katsetest, et süsteemi säästa.[57]
Novembris 2013 oli MRO edastanud Maale juba 200 terabitti andmeid. See teeb sellest NASA kõige produktiivsema Marsi sondi, olles saatnud kolm korda rohkem infot kui kõik varasemad NASA Marsi missioonid kokku.[58]
Käitursüsteem ja asendikontroll
Mars Reconnaissance Orbiteri pardal on 20 tõukurit. Kuus suuremat tõukurit tekitavad tõukejõudu kokku 1020 N ja neid kasutati orbiidile sisenemisel. Kuuest keskmise suurusega tõukurist on igaüks eraldi tekitama tõukejõudu 20 njuutoni jagu ning neid kasutati Marsi orbiidile sisenemisel ja orbiidile sisenemise kõrguse määramiseks. Kaheksat väikest tõukurit, mis tekitavad tõukejõudu 0,9 njuutonit, kasutatakse pidevalt asendi määramiseks ja korrigeerimiseks[59].
MRO tõukurid ammutavad tööks vajalikku kütust 1175 liitrisest kütusepaagist, mis täideti stardi eel 1187 kg hüdrasiiniga. Enamik kütusest (70%) kasutati ära Marsi orbiidile sisenemisel[59], kuid sondil on järgi piisavalt kütust, et toimida kuni 2030. aastateni[60]. Kütuse rõhku reguleeritakse heeliumi lisamisega.
Asendi määramisel kasutatakse lisaks tõukuritele ka nelja reaktsiooniratast, kuid neid kasutatakse tavaliselt siis, kui on tarvis stabiilset asendit (näiteks HiRISE-iga pildistamise ajal). Süsteemi kolm ratast kontrollivad igaüks ühte liikumisnurka ja neljas on tagavaraks. Üks reaktsiooniratas kaalub 10 kg ja see võib pöörelda kuni 6000 p/min[59].
Sond kasutab oma orbiidi ja vajalike manöövrite arvutamiseks kuutteist päikesesensorit (pooled on tagavaraks) ja kaht tähekompassi, mis annavad NASAle infot sondi asendi kohta. Lisaks kasutatakse kahte miniatuurset inertsimõõtmisüksust (MIMU), millest igaüks koosneb kolmest kiirendusandurist ja güroskoobist. Need süsteemid on väga olulised, sest kõrgresolutsiooniga fotode tegemiseks on vaja sondi kaamera väga täpset suunamist. Süsteemid on projekteeritud minimeerima ka vibratsiooni, et see ei häiriks piltide kvaliteeti.[61]
Remove ads
Galerii
Sond
 Sond saabumas Kennedy Kosmosekeskusse
Sond saabumas Kennedy Kosmosekeskusse Suure võimendusega antenni paigaldamine
Suure võimendusega antenni paigaldamine MRO enne lastiruumi paigutamist
MRO enne lastiruumi paigutamist MRO start
MRO start MRO start
MRO start Kunstniku kujutis sondist vaadatuna eest
Kunstniku kujutis sondist vaadatuna eest





.jpg)
MRO fotosid Marsist
 Danielsoni kraatri pind
Danielsoni kraatri pind Marsi keeriste jäetud jäljed
Marsi keeriste jäetud jäljed Victoria kraater
Victoria kraater HiRISE'i foto Marsi maalihkest
HiRISE'i foto Marsi maalihkest Liivadüün Marsi põhjapoolusel
Liivadüün Marsi põhjapoolusel Marsi laviin
Marsi laviin Centauri Montes
Centauri Montes Amenthes Fossae
Amenthes Fossae Acidalia Planitia
Acidalia Planitia Phlegra Montes
Phlegra Montes










Teised kosmoseaparaadid
 HiRISE'i foto Phoenixi Marsile maandumisest. Pildi peal tundub, et Phoenix on teel kraatrisse, kuid see maandus tegelikult 20 km kaugusele kraatri ette
HiRISE'i foto Phoenixi Marsile maandumisest. Pildi peal tundub, et Phoenix on teel kraatrisse, kuid see maandus tegelikult 20 km kaugusele kraatri ette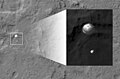 Curiosity teel Marsi pinnale
Curiosity teel Marsi pinnale Phoenix Marsi pinnal
Phoenix Marsi pinnal Kulgur Curiosity ja tema jäetud jäljed Marsil. Curiosity on pildil heleda täpina all vasakul
Kulgur Curiosity ja tema jäetud jäljed Marsil. Curiosity on pildil heleda täpina all vasakul Kulgur Opportunity Victoria kraatri juures
Kulgur Opportunity Victoria kraatri juures

_-_Flickr_-_NASA_Goddard_Photo_and_Video.jpg)



Remove ads
Viited
Wikiwand - on
Seamless Wikipedia browsing. On steroids.
Remove ads